


济南融恩机电设备有限公司 手机:13905314198 座机:0531-85960083常城
1224N012SR德玛莎水光仪专用电机

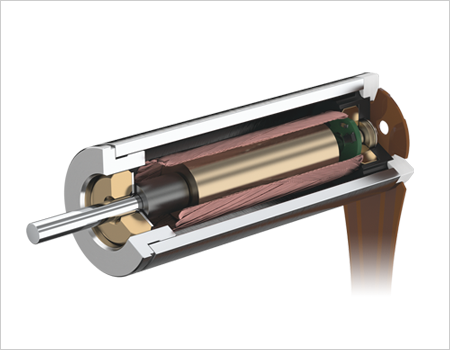
采用三相自持绕组和非磁性钢材料外壳的创造性设计,使 电机性能更加优异。无静态驻留推力和线性化的电流- 推力特性, 使 QUICKSHAFT? 成为微型定位控制的理想选择。通过电机内置霍尔传感器,使 QUICKSHAFT? 直流无刷伺 服直线电机实现位置控制。
FAULHABER 微型电机(micro-motor),是体积、容量较小,输出功率一般在数百瓦以下的电机和用途、性能及环境条件要求特殊的电机。全称微型特种电机,简称微电机。常用于控制系统中,实现机电信号或能量的检测、解算、放大、执行或转换等功能,或用于传动机械负载,也可作为设备的交、直流电源。
本文首先介绍了虚拟现实技术中力觉交互技术的概念以及研究现状,探讨了目前在领域内实现人机力觉交互的方法和原理。然后,本文面向虚拟现实技术在医学上的应用领域,针对虚拟对力觉交互技术的具体要求,设计一款可实现五自由度运动并满足相应力反馈要求的力觉交互设备,以期构建出一个可以通过视觉、听觉、力觉多感知通道进行人机交互的虚拟现实系统,用于实现对实际过程的逼真模拟。本文主要部分是对面向虚拟的力反馈设备的研究与开发,包括设备整体设计原则和指标的确定、驱动执行元件和传感器的选择、机械结构的设计与制造、设备的机构分析、设备整体装配与调试。凝汽器在线除垢机器人专用faulhaber电机投送装置研究凝汽器是工业领域广泛应用的冷却和换热设备,凝汽器的工作状态对于整个系统的冷却和作业具有至关重要的作用,然而凝汽器中水垢的产生会严重影响凝汽器的换热效果,极大程度地降低系统的工作效率。
同时,通过对具有12路信号的遥控模块进行设计改造,实现18路信号输出,用于机器人专用faulhaber电机遥控操作。研究组织级软件的功能,确定主控机软件功能模块。采用VC6.0程序设计了软件主界面、串口通信界面和图像处理界面,实现了串口通信的部分功能。对图像传输的方法和主要问题进行了研究分析。研究执行级单片机程序功能,编写了主程序、串口通信程序和跨越悬垂线夹程序。对于遥控模块程序,提出了一种利用软件二次译码实现通路扩展的方法,设计程序流程图,编写程序。通过对上述控制系统的调试与实验,证明基于PCM-3370主板的计算机系统的运行具有良好的稳定性和流畅性;无线遥控模块收发信号具有较高的可靠性和通道扩展的可行性。
1224N012SR德玛莎水光仪专用电机供应商上海罗文动力系统有限公司是一家专业从事工业传动控制产品销售、服务的高科技公司,公司拥有高素质的管理队伍和雄厚的技术实力,自成立以来,都以“诚信经营、质量第一、优质服务”的经营方针和文化理念,为客户提供好的性价比的产品和周到的服务,从而赢得客户的一致赞赏。公司与及著名厂商建立了长期稳定的技术和商务合作关系,整合优势品牌资源,为广大客户提品信息及技术支持,共同推进自动化发展进程。真诚期待能与贵司通力合作,希望我们的努力能赢得您的信任与支持!欢迎广大客户来电咨询及询价。

使用新型 FAULHABER运动控制器,您可通过循环模式的CSP、CSV和CST轻松地同步控制多个轴。已针对FAULHABER驱动程序进行优化。
针对偏瘫的进程提出进阶交互式上肢训练策略。早期采用基于表面肌电信号的自主性被动训练,训练方式为健侧上肢控制患侧上肢,达到双臂镜像协调训练的目的。中后期采用基于关节力矩信号的主动训练。后基于5DOF外骨骼式上肢机器人专用faulhaber电机平台,以多个受试者进行实验研究,实验结果一方面验证了提出的上肢机器人专用faulhaber电机系统能够实现不同的训练模式,可满足需要,另一方面验证了表面肌电控制方法与关节力矩阻抗控制方法的正确性。基于晶吻鳐的波动推进数值模拟及其实验研究自然界中的生物经历了千百万年的大自然的洗礼,终进化为适应生存环境的生物,在这过程中取得了非凡的环境适应能力。因此,对自然界中的生物的研究和模仿,有助于提升人类的科学技术。

1224N012SR德玛莎水光仪专用电机,
FAULHABER通过拉格朗日方程分析传统重力平衡串联水光仪专用faulhaber电机和未平衡串联水光仪专用faulhaber电机动力学方程差异,可知添加弹簧能够改善水光仪专用faulhaber电机动力学性能。改变弹簧刚度、安装位置及角度中的任意参数均能调整水光仪专用faulhaber电机重力平衡效果。利用能量守恒原理推导出刚度矩阵形式的弹性势能和重力势能,并分析弹性刚度矩阵分量矩阵中元素符号和数值分布特性,以此为基础总结出实现水光仪专用faulhaber电机重力平衡弹簧安装的四个必要条件。然后,对影响水光仪专用faulhaber电机重力平衡的因素进行理论分析,结果表明弹簧安装方式对重力平衡效果影响显著。
FAULHABER根据重力平衡控制系统特点,采用PID控制方案建立了直流伺服faulhaber电机的控制系统数学模型,并利用该模型在MATLAB/Simulink中进行了仿真,仿真结果表明重力平衡明显提升了控制系统动态性能。设计了等比例缩小双关节水光仪专用faulhaber电机虚拟样机,并在ADAMS中对水光仪专用faulhaber电机在不同末端负载情况下进行了多组动力学仿真,仿真结果与本文基于刚度矩阵所建立的重力平衡理论结果吻合。后,以双关节水光仪专用faulhaber电机虚拟样机为基础搭建了双关节水光仪专用faulhaber电机重力平衡实验平台,用LABVIEW设计了实验平台上位机,并对双关节伺服faulhaber电机进行了调试。
1224N012SR德玛莎水光仪专用电机
利用虚拟RGB-D相机采集图像,完成ORB和模板匹配算法的目标识别。利用规划场景与碰撞检测,完成LBT-RRT高维空间运动规划算法验证实验。利用运动规划库Move It!和物理仿真环境Gazebo,完成机器人专用faulhaber电机自主抓取目标物体的仿真实验。搭建机器人专用faulhaber电机综合实验平台,验证机器人专用faulhaber电机的抓取能力。首先,进行机器人专用faulhaber电机与相机的手眼标定实验,确定RGB-D相机Kinect V2与机器人专用faulhaber电机的关系;然后,进行目标识别和6D位姿估计实验,完成目标识别和位姿输出;进行LBT-RRT运动规划验证试验,保证抓取目标的顺利进行;后,进行机器人专用faulhaber电机抓取操作综合实验,完成对多个不同形状大小物体的抓取。
在特征降维方面,从分类的角度,提出了基于类别邻域的Isomap降维方法(Category Neighbor-Isomap,CN-Isomap),在特征降维过程中利用样本的类别信息来保持原样本之间固有的几何结构关系,实现准确降维。关于动态手势识别,通过分析现有识别算法的特点和自然人机交互过程中的动态手势特性,提出了基于时间轴压缩的手势时空建模方法,以手势的时空差异性,同时也是为了能够在此建模的基础上识别由不同用户在不同视角下作出的手势。根据动态手势的运动特性,提出了速率边沿检测算法来分割手势的起止过程,通过跟踪图像平面内的手势运动,得到表征手势的一系列离散轨迹点。基于格式塔心理学的知觉定律,采用3次条拟合出手势的表观轨迹。
(4)水下滑翔器内部机械结构的设计。在外形尺寸的基础上,对四个模块-耐压外壳体、姿态调整机构、浮力驱动机构、尾舵机构分别进行设计,并验证设计的强度与参数设计的合理性。"输电线路巡检机器人专用faulhaber电机智能控制系统研究与设计输电线路巡检机器人专用faulhaber电机能够代替人工进行线路巡检工作,提高线路巡检工作的效率和精度,具有较高的经济效益。因而,积极研制性能可靠的巡检机器人专用faulhaber电机具有重要的实用价值。本文以新型巡检机器人专用faulhaber电机机械本体为控制对象,研究开发了能实现巡检机器人专用faulhaber电机自主行走和自主越障的智能控制系统。本文通过研究分析机器人专用faulhaber电机行走与越障动作原理,确定控制系统的功能要求。