


济南融恩机电设备有限公司 手机:13905314198 常城
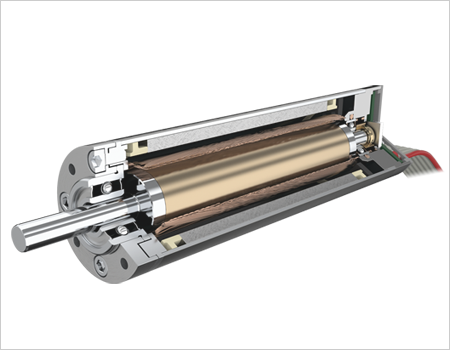
1336U024CXR德玛莎水光仪专用马达

FAULHABER 目前拥有员工 1800 余名。福尔哈贝传动技术(太仓)有限公司位于江苏省太仓市,是总部位于德国的FAULHABER集团的全资子公司,负责FAULHABER集团微型驱动系统在中国的销售,技术支持和服务.
FAULHABER 微型电机(micro-motor),是体积、容量较小,输出功率一般在数百瓦以下的电机和用途、性能及环境条件要求特殊的电机。全称微型特种电机,简称微电机。常用于控制系统中,实现机电信号或能量的检测、解算、放大、执行或转换等功能,或用于传动机械负载,也可作为设备的交、直流电源。

包括:精密减速箱 (行星齿轮,正齿轮和 低回差齿轮)高分辨率编码器(增量编码器和绝对值编码器)高性能的电子驱动器 (调速驱动器,运动控制器)流无刷电机直流无刷微电机直流无刷微电机在线阅读产品纽扣直流无刷电机, 直流无刷减速电机直流无刷电在线阅读产品 纽直流无刷电机产品 直流无刷减速电机直流无刷电机类型无论是高转矩四磁极伺服电机,高效率扁平电机。
近年来,仿生机械在我国的海洋开发和水下探测的需求越来越多,仿生机械逐渐成为机械学科的新研究热点。模仿不同游动方式的仿生机器鱼在相继面世,将给水下推进技术带来新的变革。仿生机器鱼的研制,离不开对鱼游动机理的研究。为深入探索仿生原型的推进机理,研究者采用理论分析和实验测试的方法进行了研究,但都没有获得与真鱼相媲美的游动推进效果。因此,本文从揭示晶吻鳐波动推进机理出发,对仿生晶吻鳐模型的直线前游和转弯等问题进行研究。以研究仿生对象的推进机理为出发点,提出了一种用于求解仿生模型多自由度运动的数值方法。首先,建立计算域(流体域)的控制方程;其次,给定仿生模型的运动学方程,建立鱼体域的控制方程;第三,耦合计算流体域和鱼体域的控制方程,将鱼体的主动变形输入流场中,使鱼体的运动转移到周围流场域,由于力的作用是相互的,流体会对鱼体产生一个反作用力,从而驱动鱼体在流场中行进;后采用三维形变翼型算例验证了数值方法的正确性,并将其应用到仿生晶吻鳐模型的直线前游和转弯性能的研究中。
1336U024CXR德玛莎水光仪专用马达供应商上海罗文动力系统有限公司是一家专业从事工业传动控制产品销售、服务的高科技公司,公司拥有高素质的管理队伍和雄厚的技术实力,自成立以来,都以“诚信经营、质量第一、优质服务”的经营方针和文化理念,为客户提供好的性价比的产品和周到的服务,从而赢得客户的一致赞赏。公司与及著名厂商建立了长期稳定的技术和商务合作关系,整合优势品牌资源,为广大客户提品信息及技术支持,共同推进自动化发展进程。真诚期待能与贵司通力合作,希望我们的努力能赢得您的信任与支持!欢迎广大客户来电咨询及询价。
所以国内对高精密微特电机还依赖进口。据海关统计,1995~2000年年均用汇增长26.9%,2001年虽然增加4.81%,还达11.97亿美元。市场现状经济在不断发展,人们生活水平在不断提高,微型电机作为不可缺少的基础机电产品,它既有低、中档、低投资的劳动密集型产品,又有采用先进制造技术、新兴电子技术和新材料技术应用相结合的高投资术密集型产品,并已融入生产和销售的全球化。
同时验证了单片机控制板的正确性。本文工作的创新性,主要有以下几点:设计了基于“远程主机+组织级+执行级”的控制系统结构,提出了基于规则库的机器人专用faulhaber电机动作规划方法。根据这些理论,设计了由“远程计算机+PC/104主板计算机+单片机系统”组成的控制系统。提出了一种扩展遥控模块信号通道的方法。设计了控制软件界面和越障程序。中国蕨类植物孢子形态的研究Ⅷ.岩蕨科利用扫描电镜对中国产岩蕨科(Woodsiaceae)3属18种植物孢子进行了观察。结果表明,孢子单裂缝,两侧对称,极面观为椭圆形或宽椭圆形,赤道面观为半圆形或超半圆形;极轴长32~50μm,赤道轴长43~61μm;外壁表面光滑,由周壁形成孢子表面纹饰的轮廓,根据表面纹饰,孢子可分为5种类型:(1)片状纹饰:周壁表面形成疏密不一的片状褶皱,并连成网状;(2)脊状纹饰:周壁表面形成脊状褶皱,并连成网状;(3)翅脊状纹饰:周壁表脊状褶皱,并连成网状,脊的顶端具流苏状不明显的低翅;(4)翅状纹饰:周壁外层形成翅状纹饰,翅的边缘较薄;(5)丝毛状纹饰:周壁结构疏松,由细丝交织成立体网状。
1336U024CXR德玛莎水光仪专用马达,
FAULHABER通过拉格朗日方程分析传统重力平衡串联水光仪专用faulhaber电机和未平衡串联水光仪专用faulhaber电机动力学方程差异,可知添加弹簧能够改善水光仪专用faulhaber电机动力学性能。改变弹簧刚度、安装位置及角度中的任意参数均能调整水光仪专用faulhaber电机重力平衡效果。利用能量守恒原理推导出刚度矩阵形式的弹性势能和重力势能,并分析弹性刚度矩阵分量矩阵中元素符号和数值分布特性,以此为基础总结出实现水光仪专用faulhaber电机重力平衡弹簧安装的四个必要条件。然后,对影响水光仪专用faulhaber电机重力平衡的因素进行理论分析,结果表明弹簧安装方式对重力平衡效果影响显著。
FAULHABER根据重力平衡控制系统特点,采用PID控制方案建立了直流伺服faulhaber电机的控制系统数学模型,并利用该模型在MATLAB/Simulink中进行了仿真,仿真结果表明重力平衡明显提升了控制系统动态性能。设计了等比例缩小双关节水光仪专用faulhaber电机虚拟样机,并在ADAMS中对水光仪专用faulhaber电机在不同末端负载情况下进行了多组动力学仿真,仿真结果与本文基于刚度矩阵所建立的重力平衡理论结果吻合。后,以双关节水光仪专用faulhaber电机虚拟样机为基础搭建了双关节水光仪专用faulhaber电机重力平衡实验平台,用LABVIEW设计了实验平台上位机,并对双关节伺服faulhaber电机进行了调试。
1336U024CXR德玛莎水光仪专用马达
它不推进器,仅依靠浮力驱动和姿态调整,以一条锯齿形的轨迹在水中航行。由于具有低阻低噪、低成本、续航时间长、航行范围广的优点,水下滑翔器可广泛应用于调查和民用领域中。水阻力是影响水下滑翔器性能的关键因素。本文以中小型水下滑翔器为研究对象,设计一款低阻力的新构型水下滑翔器。本文研究的主要内容如下:(1)水下滑翔器的工作原理,并进行总体设计。(2)水下滑翔器外形的优化设计。先设计主体外形,通过对比分析几种常见的水下滑翔器主体外形的水阻力性能,选出水动力性能较好的主体外形;再设计附体(水平机翼和垂直尾翼)外形,包括翼型的选取,展长、弦长、后掠角的设计与翼的布置,得到一个水阻性能较优的完整水下滑翔器的外形。
可吸收缝合线的研究进展医用可吸收缝合线的研究是生物医用高分子研究中活跃的领域之一,已广泛应用于医学和动物医学的外科中。本文对几种天然及人工合成可吸收缝合线在体内的吸收情况、降解性能及研究状况进行了详细的阐述,并对它们的优缺点作出了科学的评价。同时,描述了我国可吸收缝合线研究现状。三维建模软件CINEMA 4D在园林辅助设计中的应用采用德国三维建模渲染软件CINEMA 4D,研究基于该平台的日照、植物、地形、建筑小品等风景园林设计要素的表现途径与方法,总结出CINEMA 4D在建模和渲染等方面的特点,扩展了该软件在风景园林设计中的具体应用。移动系统是月球探测车的关键部分之一,提高月球车的移动性能是月球车移动系统设计的主要目的之一。
关节式履带移动机器人专用faulhaber电机自主越障行为控制当今的移动机器人专用faulhaber电机导航研究在较为平整的地面环境中的应用已经取得了很多成功。但是,针对存在着典型障碍物环境中的自主越障控制的研究不多见。为了满足和工业应用对机器人专用faulhaber电机的越障性能和执行效率的要求,有效地提高移动机器人专用faulhaber电机自主越障能力。本文针对爬楼梯这类常见的越障任务,提出了一种关节式履带移动机器人专用faulhaber电机基于反应式行为的自主越障控制方法。首先,针对自主爬楼梯的要求,对实验室自研的关节式履带移动机器人专用faulhaber电机进行了适当的改造。结合履带机器人专用faulhaber电机结构参数和楼梯环境设计了一种由可旋转式激光雷达和惯性测量单元构成的越障环境感知系统,设计了与之相匹配的运动控制系统,并对机器人专用faulhaber电机进行了运动学建模。