


济南融恩机电设备有限公司 手机:13905314198 常城
2657W036CR德玛莎水光仪专用电机

取得了较好的控制效果。开发了一套关节伺服驱动器,其实验表明该驱动器能完成转矩、转速及位置的控制功能。研制了高压输电线路巡检机器人专用faulhaber电机的样机,在模拟输电线路的实验室中完成了调试实验。在实际500KV高压输电线路的地线上完成了现场巡检实验,完成了在地线上的行驶实验,翻越了防振锤、耐张塔等障碍物,实验结果表明该机器人专用faulhaber电机具有自主越障能力和巡检能力,具有结构精简,操控方便,行为自主,巡检高效等特点,适合山区高压输电线路的巡检。巡检机器人专用faulhaber电机为输电线路智能化巡检提供了一整套切实有效的解决方法。本文以精密机械为基础,采用光电传感器、旋转编码器、直线运动单元和dsPIC单片机,研制了一个小型的单坐标微米级自动测量仪。
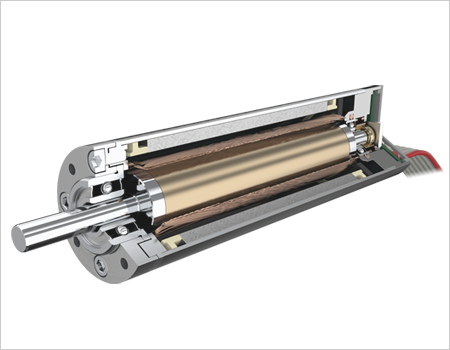
FAULHABER 微型电机(micro-motor),是体积、容量较小,输出功率一般在数百瓦以下的电机和用途、性能及环境条件要求特殊的电机。全称微型特种电机,简称微电机。常用于控制系统中,实现机电信号或能量的检测、解算、放大、执行或转换等功能,或用于传动机械负载,也可作为设备的交、直流电源。

Nikolaus Franke教授从 2002年作为科学总监开始接手该项目,他也是维也纳经济和工商管理大学创业和创新研究所的创始人兼董事。
仿真实验结果表明,该方法能够有效地完成自主爬楼梯任务。"上肢机器人专用faulhaber电机的迭代学习控制上肢机器人专用faulhaber电机是近几年来迅速发展的一门新兴技术,是机器人专用faulhaber电机技术在医学领域的新应用,利用机器人专用faulhaber电机对进行训练可以提高偏瘫训练的针对性及科学性,能为制定更好的方案,进一步提高的效率。然而,机器人专用faulhaber电机本身是一个具有很强的非线性、强耦合的系统,为了实现对机器人专用faulhaber电机期望轨迹的高精度跟踪,本文以五自由度上肢机器人专用faulhaber电机作为控制对象,研究迭代学习控制算法在其上的应用。首先,本文在坐标变换理论的基础上,对上肢机器人专用faulhaber电机的运动学系统作了较深入的分析与研究,并且应用Matlab仿真软件中的SimMechanics和虚拟现实工具箱,按照实际机器人专用faulhaber电机参数,建立了上肢机器人专用faulhaber电机的运动学仿真模型,并对其进行了仿真,结果表明,三维模型的仿真效果更直观,可以更清楚、更真实的反应机器人专用faulhaber电机手臂的动态运动情况。
2657W036CR德玛莎水光仪专用电机供应商上海罗文动力系统有限公司是一家专业从事工业传动控制产品销售、服务的高科技公司,公司拥有高素质的管理队伍和雄厚的技术实力,自成立以来,都以“诚信经营、质量第一、优质服务”的经营方针和文化理念,为客户提供好的性价比的产品和周到的服务,从而赢得客户的一致赞赏。公司与及著名厂商建立了长期稳定的技术和商务合作关系,整合优势品牌资源,为广大客户提品信息及技术支持,共同推进自动化发展进程。真诚期待能与贵司通力合作,希望我们的努力能赢得您的信任与支持!欢迎广大客户来电咨询及询价。

术语精密合金换向是指在电刷和换向器所用的材料含有高性能 的贵金属合金。这个类型的换向系统主要用于要求 体积非常小,接触电阻非常低和换相信号精准的应用。它特别 适用于低电流应用, 如用电池供电的设备。总体来说,精密合金换向的电机在高标称效率负载下连续工 作时,可以表现出非常出色的整体性能。
另一方面,从六足机器人专用faulhaber电机系统规模、自由度数量、传感信息的融合等角度提出了以多足机器人专用faulhaber电机递阶式任务分配方式和信息传输机制为基础的四级控制系统方案。从软件工程的角度分析步态控制规则和状态转移过程,建立一个模块化的可扩展的软件体系。后本文基于Matlab-ADAMS仿真环境构建机器人专用faulhaber电机模型,调用解算结果,实现了六足机器人专用faulhaber电机二步态行走。实验结果验证了步态控制逻辑的正确性,以及采用CPG算法结合运动学解算结果共同控制机器人专用faulhaber电机运动的可行性。水下滑翔器的优化设计与运动分析水下滑翔器是为满足更广泛的海洋监测和海底资源勘探的需要而开发的一种新型无人水下机器人专用faulhaber电机。
2657W036CR德玛莎水光仪专用电机,
FAULHABER通过拉格朗日方程分析传统重力平衡串联水光仪专用faulhaber电机和未平衡串联水光仪专用faulhaber电机动力学方程差异,可知添加弹簧能够改善水光仪专用faulhaber电机动力学性能。改变弹簧刚度、安装位置及角度中的任意参数均能调整水光仪专用faulhaber电机重力平衡效果。利用能量守恒原理推导出刚度矩阵形式的弹性势能和重力势能,并分析弹性刚度矩阵分量矩阵中元素符号和数值分布特性,以此为基础总结出实现水光仪专用faulhaber电机重力平衡弹簧安装的四个必要条件。然后,对影响水光仪专用faulhaber电机重力平衡的因素进行理论分析,结果表明弹簧安装方式对重力平衡效果影响显著。
FAULHABER根据重力平衡控制系统特点,采用PID控制方案建立了直流伺服faulhaber电机的控制系统数学模型,并利用该模型在MATLAB/Simulink中进行了仿真,仿真结果表明重力平衡明显提升了控制系统动态性能。设计了等比例缩小双关节水光仪专用faulhaber电机虚拟样机,并在ADAMS中对水光仪专用faulhaber电机在不同末端负载情况下进行了多组动力学仿真,仿真结果与本文基于刚度矩阵所建立的重力平衡理论结果吻合。后,以双关节水光仪专用faulhaber电机虚拟样机为基础搭建了双关节水光仪专用faulhaber电机重力平衡实验平台,用LABVIEW设计了实验平台上位机,并对双关节伺服faulhaber电机进行了调试。
2657W036CR德玛莎水光仪专用电机
属与陆蛙属关系较近,浮蛙属与大头蛙属是姐妹群。浮蛙属是这一支中为特化的类群。在第二支系中,林蛙属和侧褶蛙属分化较早,趾沟蛙属处于林蛙属与水蛙属间的过渡位置,臭蛙属与湍蛙属亲缘关系较近,湍蛙属是这一支中为特化的类群。"1. XJ-1保存液的研制及TLSF_(JM)对大鼠肝、心急性排斥反应防治作用的实验研究 2. 我国首例血缘关系活体肝的观察无论是还是,目前都已成为中末期和器质变的有效手段,至今或全球累计总例数都已逾6万例,并且良好。而我国在肝、心领域与国外还存在巨大的差异,因此加强这一领域的研究是极其必要的。本研究的选题正是基于这样的出发点,围绕大鼠和的模型进行了有关保存和免疫抑制的研究;还对1例活体肝作了长期的随访观察。
终证实:已建成的毛细管放电极紫外光源演示装置安全可靠、运行稳定,等离子体辐射光谱基本位于极紫外目标区,可以开展进一步的极紫外光输出实验。上有很多科研小组或团体进行极紫外光刻光源的研究,随着研究的深入,极紫外光刻光源的输出功率不断增大,目前已经达到了应用标准。但高功率光源的获得依赖于极高的重复工作频率,单次输出功率并不高。高重复频率工作对光刻过程及环境有很高的要求,这不仅增大了光刻过程的难度,而且提高了生产成本。本文提出了毛细管放电三束等离子体极紫外环带光源的设计,正是为了解决光刻光源单次输出功率小的问题。通过对毛细管放电三束等离子体形成环带光源的过程进行受力分析,定性计算了环带光源的输出参量等比较全面的设计、论证。
在快速控制原型的基础上逐步地引入实物部件从而实现半实物仿真系统的构建。整个地面半实物仿真系统的开发过程是一种基于模型的系统设计思想,实验结果证明了方法的有效性。电磁集能式调谐质量阻尼器的研究与仿真分析土木工程结构在强风、地震、波浪等外部激励下,容易产生大幅振动,影响结构的安全和舒适性,为了减轻或抑制结构由于动力荷载所引起的响应,经典TMD用于结构振动控制时,主结构振动能量被转移到附加TMD,并激起TMD产生比主结构大得多的振幅。如果把此类耗能元件替换成具有能量收集功能的换能器,或者在主结构与附加TMD相对位移之间增加压电换能器或电磁换能器等构件,主结构的振动能量能够很好地转化为电能。本文以自然科学为课题来源,开展关于能量收集与结构减振相结合系统的研究与仿真分析。